-
 記事 · 2026年14月21日
記事 · 2026年14月21日自动化平台能替代人工移液吗?
全文を読んでください -
記事 · 2026年5月20日
自动化移液机器人有哪些核心功能?
全文を読んでください -
記事 · 2026年9月19日
自动化平台和人工移液哪个更精准?
全文を読んでください
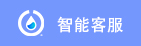
ピペッティングロボットアームは、高度に自動化された液体処理装置です。従来のピペッティングツールを置き換えて、勾配希釈、ピペッティング、液体の組み合わせなどの高精度の液体処理タスクを自動的に完了し、ターゲットオブジェクトの効率的かつ正確な検出を実現するために検出器と組み合わせて使用できます。
1。ピペッティングロボットアームの構造1.制御システム:通常、ロボットアームの動作と動作を制御します。 2。PipetHead:ロボットアームの端に位置し、液体を吸収および放出するために使用されます。ピペットヘッドには通常、ストローと注射器が含まれています。これにより、液体の吸収と放出が内部圧力を変更することで吸収と放出が可能になります。 3。レールシステム:ロボットアームの動きをサポートおよびガイドして、その安定性と精度を確保するために使用されます。トラックシステムは、ロボットアームが3次元空間のターゲット位置に正確に配置されることを保証します。 4。センサー:液体の位置、容量、圧力などのパラメーターを検出するために使用され、制御システムは必要に応じてピペッティングヘッドの動きと動作を調整できるようにします。センサーは、操作のインテリジェンスと自動化を改善します。
2。ピペッティングロボットアームの作業原理1。ポジショニング:ピペッティングヘッドを、試験チューブ、オリフィス、マイクロプレートなどのコンテナなどのトラックシステムを介して液体処理が必要な位置に位置します。 2。吸引:ピペットヘッドは標的液の上で下がり、液体はピペットヘッド内の圧力差(通常は負の圧力)を変更することによりストローに入ります。 3。輸送:ピペッティングヘッドは、吸収された液体をターゲット位置(つまり、液体が放出される場所)にもたらします。輸送中、制御システムは、必要に応じてピペッティングヘッドの移動経路と速度を調整して、液体の正確な移動を確保します。 4。放出:ピペットヘッドがターゲット位置に到達した後、内部圧力差(通常は陽圧)を変更して、シリンジから液体を放出します。
3。ピペッティングロボットアームの精度制御1。機械構造設計(1)高精度成分:ベアリング、ギア、ガイドレールなどの高精度機械コンポーネントは、摩擦を減らし、剛性と安定性を改善し、それによってロボットアームの動きの精度を改善するために使用されます。 (2)衝撃吸収装置:衝撃吸収装置を取り付けて、機械的振動の精度に対する影響を減らし、動作中にロボットアームの安定性を確保します。 (3)合理的なレイアウト:ロボットアームのレイアウトと構造設計を最適化して、不必要な可動部品と重量を減らし、全体的な動きの精度と応答速度を向上させます。 2。トランスミッションシステムの最適化(1)精密伝送コンポーネント:精密ギアボックス、高精度ベルト、その他の伝送コンポーネントを使用して、伝送システムの精度と安定性を改善します。 (2)アライメント調整:滑らかで正確な伝送プロセスを確保するために、伝送要素(ギア、ベルト、チェーンなど)のアライメント(ギア、ベルト、チェーンなど)を定期的に確認して調整します。 (3)摩耗部品の交換:部品の摩耗によって引き起こされる精度の劣化を避けるために、摩耗した伝送部品を時間内に交換します。 3.制御システムの最適化(1)高精度センサー:高精度センサーを使用して、正確な位置と強制情報を取得し、制御システムの正確なフィードバックデータを提供します。 (2)高度な制御アルゴリズム:適応制御、ファジーコントロール、およびその他の高度なコントロールアルゴリズムが採用され、ロボットアームのモーション軌道と速度をより適切に制御し、制御の精度を向上させます。 (3)高性能コントローラーとアクチュエーター:高性能コントローラーとアクチュエーターを使用して、制御信号の精度と応答速度を確保し、それによりロボットアームの全体的な精度を改善します。 4。キャリブレーションと検証(1)定期的なキャリブレーション:検出された精度偏差データによると、ロボットアームは定期的に校正され、関節角度とエンドエフェクターの位置の関係を修正します。 (2)モーション軌道の最適化:ロボットアームのモーション軌道プログラミングを再検討および最適化して、動きの軌跡がスムーズで合理的であることを確認し、不必要な緊急停止、鋭いターンおよびその他のアクションを避け、不安定な動きによって引き起こされる精度エラーを減らします。 (3)精度の検証:調整を完了した後、ロボットアームの精度を定期的に検証し、精度監視の標準と手順を確立して、ロボットアームが生産プロセス中に安定した精度を維持するようにします。 5。環境因子制御(1)温度制御:機械式アーム作業環境の温度を安定させ、温度変化によって引き起こされる機械的成分の熱膨張と収縮を避け、それによって精度に影響します。 (2)衝撃吸収と防塵:ロボットアームの通常の動作に対する振動と粉塵の影響を減らすために、必要な衝撃吸収と粉塵防止策を講じます。
最新の実験室の自動化のための重要なツールの1つとして、ピペッティングロボットアームは、その精度、自動化、効率性、スケーラビリティにより、多くの分野で重要な役割を果たします。テクノロジーの継続的な進歩とアプリケーションの需要の増加に伴い、ロボットアームのピペッティングは引き続き、アプリケーションの機会と開発の見通しを増やし続けます。


経験豊富なサービスチームと強力な制作サポートチームは、顧客に心配のない注文サービスを提供します。

简体中文

繁體中文

English
日本語
한국인